NaN
/
of
-Infinity
HCS885XF-SWNAV L1/L5 Smart GNSS Helical SDK
HCS885XF-SWNAV L1/L5 Smart GNSS Helical SDK
Regular price
$422.73 USD
Regular price
Sale price
$422.73 USD
Unit price
/
per
Couldn't load pickup availability
The HCS885XFSDK Smart GNSS Helical SDK is the best way to fast track precise location and heading in your project. The L5 enhanced signal architecture with stronger broadcast signal offers more precise standard localization and improved multi-path mitigation while operating in an ITU/ARNS aviation band with regulatory interference protection. The SDK includes one* HCS885XF Smart GNSS Precise Heading Helical Antenna with serial to USB bridge to connect to your PC. TruPrecision software simplifies the User Interface to the antenna’s GNSS receiver, and provides extras such as logging tools, GNSS signal strength graphs and message routing for sharing RTCM between base and rover antenna pairs across the internet. It also includes a 6 month complementary access to Swift Navigation’s Skylark Cx Corrections, with an easy process for quickly applying corrections (RTK or PPP-RTK) to the antenna. ROS2® drivers also available.
CoverageL1 C/A, L5, L1OF, G2,
|
MountSurface Mount |
Connector Options6 Position Receptacle Connector JST, 1.25 mm |
HCS885XFSDK Smart GNSS Helical SDK includes:
-
1 x Calian HCS885XF Smart GNSS Precise Heading helical antenna with CMOS interface
- Tallymatics TruPrecision Application for Software Development and Verification
- 6 month trial subscription to the Swift Navigation Skylark Cx Precision Positioning service
- 1 x JST to USB cable
- Ordering Information:
- 33-HCS885XFSDK-SWNAV-4 (CMOS)
- 33-HCS885XFSDK-SWNAV-2 (RS-232)
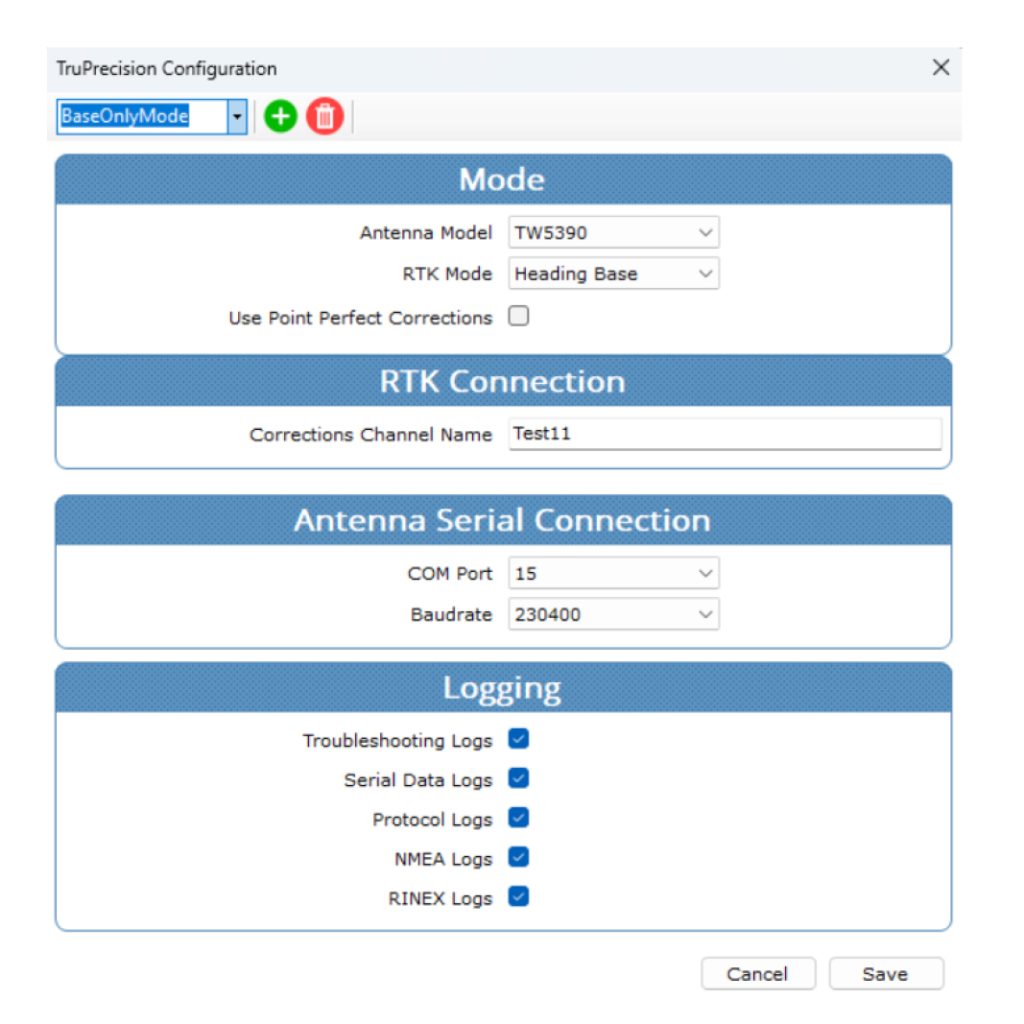
The TruPrecison SDK application is a Windows application which provides an NTRIP connection to stream Skylark corrections to the TW5794 Smart Antenna via the the USB, which also provides a Virtual COM Port to allow customers to connect their existing applications to the Tallysman TW5794 Smart GNSS Precise Heading Antenna high precision “corrected” position data output. The position data may be either NMEA or UBX formatted messages. ROS2® Drivers are available for integration with ROS2 open framework projects.